

Rozwiązania Lapp Kabel w robotach kompaktowych

 Roboty kompaktowe oraz współpraca człowiek-robot to jedne z najważniejszych trendów w światowej robotyce. Konstrukcja niewielkich robotów o wielu osiach ruchu jak również ich okablowanie i system konektorów są jednak dużym wyzwaniem inżynierskim. W artykule przedstawiono kilka opcji realizacji połączeń kablowych w robotach w oparciu o rozwiązania firmy Lapp Kabel.
Roboty kompaktowe oraz współpraca człowiek-robot to jedne z najważniejszych trendów w światowej robotyce. Konstrukcja niewielkich robotów o wielu osiach ruchu jak również ich okablowanie i system konektorów są jednak dużym wyzwaniem inżynierskim. W artykule przedstawiono kilka opcji realizacji połączeń kablowych w robotach w oparciu o rozwiązania firmy Lapp Kabel.
Obraz robotów przemysłowych utrwalany przez dekady to odgrodzone siatką wielkie ruchome ramiona, które spawają ze sobą poszczególne elementy nadwozi samochodowych. Widok ten ulega jednak zmianie. W kolejnych generacjach roboty stają się znacznie mniejsze, nie są już odgradzane siatką a wręcz współpracują w ścisłej relacji z człowiekiem. Te lekkie roboty są projektowane w taki sposób, aby mogły być szybko przekonfigurowane do wykonywania nowych zadań, na przykład do manualnego sterowania przez operatora. Celem jest elastyczne przygotowanie produkcji w zależności od potrzeb. Tendencja ta jest zgodna z filozofią Przemysłu 4.0 i stale rozwijana. W sektorze motoryzacyjnym istnieje już program pilotażowy, w którym roboty poruszają się po fabryce pomiędzy kolejnymi stacjami procesowymi i wzajemnie kontrolują swoją pracę. Takie roboty mogą w ciągu jednego dnia budować auta od samego początku do gotowego produktu, zgodnie z indywidualnym zapotrzebowaniem odbiorcy – klienta.

Robot kompaktowy Racer włoskiej produkcji Comau stosowany w różnorodnych aplikacjach przemysłowych
Lekkie roboty – lekkie kable
Istnieje jednak wiele praktycznych przeszkód, które muszą pokonać producenci robotów, tak aby maszyny te mogły niezawodnie realizować swoje funkcje. Jednym z ważnych wyzwań konstrukcyjnych jest okablowanie. Również lekkie lub kompaktowe roboty potrzebują zasilania napędów, uruchamiania chwytaków oraz transmisji danych z czujników lub kamer, w które są wyposażone. Rozwiązania te muszą zajmować niewiele miejsca i być jak najlżejsze, by jak najmniej obciążać urządzenie. Zwykle także w nowoczesnych, małych i lekkich robotach wszystkie połączenia elektryczne, czyli kable, są zabudowane wewnątrz ramion robotów. Gdyby były umieszczone na zewnątrz, mogłyby wchodzić w kolizję ze współpracującym operatorem. Taka sytuacja dodatkowo komplikuje problem okablowania. Jeżeli przewody biegnące na zewnątrz muszą wytrzymywać określony promień gięcia, to wewnątrz ramion te promienie są jeszcze ciaśniejsze, a przewody są narażane nie tylko na ciaśniejsze zginanie, ale także na dużo silniejsze skręcanie przy osiach skrętu elementów składowych robotów.
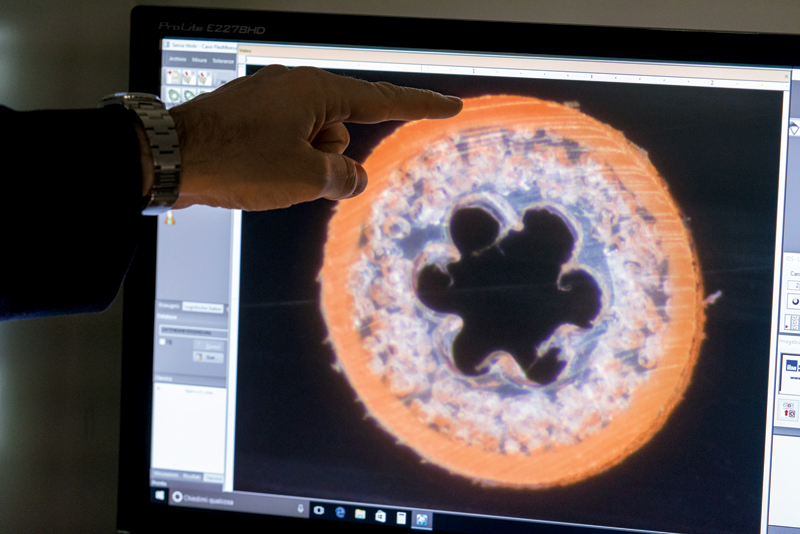
Przekrój izolacji wykonanej ze spienionego PE
Dobór przewodów
W odpowiedzi na te wymagania opracowanych zostało kilka metod produkcji i stosowania przewodów na potrzeby robotyzacji. Przekroje poprzeczne żył miedzianych są zdeterminowane przez specyfikację serwonapędów lub innych narzędzi, które muszą zostać zasilone, więc w tym obszarze nie ma możliwości redukcji objętości połączeń elektrycznych. W małych robotach napędy mają jednak mniejszą moc, więc przy starannym doborze odpowiednich kabli istnieje szansa na zaoszczędzenie zajmowanego przez nie miejsca. Konstruktorzy muszą zatem porzucić zasadę doboru przewodów z „zapasem” i nie dobierać przewymiarowanych przewodów serwo, na które w małej maszynie nie ma miejsca. Podobne podejście może także dotyczyć przewodów sygnałowych. Jeżeli robot ma tylko kilka czujników binarnych, to zamiast przewodu Cat 6A wystarczy zastosować Cat 5. Jeżeli powyższe metody optymalizacji okablowania nie wystarczą, możliwe jest zastosowanie kolejnych rozwiązań.
Odpowiedni materiał izolacji
Izolacja zapobiega wzajemnemu zwarciu żył w przewodzie oraz ma znaczący wpływ na możliwości transmisji danych, szczególnie w przypadku transmisji Fieldbus czy Ethernet. Najlepsze izolacje minimalizują pojemność przewodu, co zwiększa możliwość szybszej transmisji. Pojemność jest określona przez odległość od siebie dwóch przewodników oraz wartości stałej dielektrycznej izolatora. W produkcji kompaktowych przewodów trzeba zatem stosować materiały z jak najniższą stałą dielektryczną. Sprawdzonym w tej kwestii tworzywem jest PE (polietylen). W procesie dalszego poprawiania jego właściwości dielektrycznych dokonuje się spieniania polietylenu przy ekstruzji izolacji. Regulując ilość gazu spieniającego PE można dokładnie regulować właściwości przewodu, takie jak jego pojemność i impedancja. Cienkie przewody, optymalizowane pod względem zajmowanej przestrzeni, powinny być wytwarzane przy bardzo precyzyjnej kontroli procesu wykonywania izolacji PE i stopnia jej spienienia.

Przewód Lapp Kabel Etherline PN Cat 6A Y Flex – odpowiednia budowa daje możliwość stosowania go m.in. w kompaktowych robotach
Zmienna długość skręcenia
Aby dobrze zwizualizować zagadnienie odpowiedniego splotu żył, można porównać je do zaplatania włosów. Im gęściej są one splecione, tym warkocz staje się grubszy. Gdyby związać tę samą ilość włosów w kucyk, to okazałoby się, że jest on wyraźnie cieńszy. Podobnie dzieje się z żyłami podczas splatania. Przewody do aplikacji ruchomych mają wzajemnie skręcone żyły, ponieważ zwiększa to ich elastyczność. Jeżeli byłyby ułożone prosto, równolegle, to podczas zginania zewnętrzne żyły ulegałyby rozciąganiu a wewnętrzne kompresji. Przewód w takim wykonaniu byłby bardzo sztywny. Zatem grubość i elastyczność przewodu można kontrolować właśnie poprzez odpowiednią długość skręcenia, czyli długość odcinka, na którym żyły wykonują pełny skręt. Jeżeli ta długość jest większa, to skręt jest mały i przewody mają mniejszą grubość zewnętrzną. Lapp Kabel dostarcza przewody ze specjalnie wydłużoną długością skręcenia żył dla producentów robotów kompaktowych.
Transmisja danych
W przypadku transmisji danych, skręcenie par żył wpływa również na skuteczność przesyłu. Różnice w budowie przewodów występują tu m.in. w zależności od pełnionych zadań. W klasycznej robotyce sygnały kontrolne, zasilanie jak również informacje z czujników są często transmitowane równolegle. W przypadku większych ilości danych, dla uzyskania szybszego połączenia stosowana jest transmisja szeregowa z wykorzystaniem przewodów Ethernet Cat 5 z przepustowością do 100 Mbit/s. Dla robotów kompaktowych te linie przesyłowe są zbudowane jako gwiazdowe czwórki. Dwie pary żył skręcone wewnątrz płaszcza zewnętrznego zajmują dzięki temu mniejszą przestrzeń w porównaniu do wspomnianych wcześniej par skręconych odpornych na wielokrotne zginanie i skręcanie.
Gwiazda w centrum
Sytuacja staje się odmienna, kiedy robot posiada bardzo wiele czujników czy chociażby kamerę, która analizuje produkty pod kątem kontroli jakości. Przewód konstrukcji gwiazdowej czwórki nie jest już wystarczający, ponieważ dwie pary żył nie są w stanie poradzić sobie z taką ilością danych. W tym przypadku odpowiednim wyborem są przewody Etherline Cat 6A, zapewniające transmisję do 10 Gbit/s. Są one zbudowane z czterech wzajemnie skręconych par, co oznacza, że zajmują więcej miejsca niż w przypadku gwiazdowej czwórki. Aby nadać tego rodzaju przewodom odpowiednią grubość i trwałość w aplikacjach ruchomych, stosuje się ich specjalna konstrukcję. Pomiędzy cztery pary żył wpleciony jest specjalny plastikowy rdzeń, który pozwala na zachowanie odstępu pomiędzy parami żył oraz zapewnia niezmienność tego odstępu podczas ruchu. Dodatkowo rdzeń redukuje też przesłuch między sąsiadującymi parami. Taka budowa powoduje, że przewód bardzo dobrze sprawdza się w trudnych warunkach pracy w robotach.

Zmodyfikowane złącza Epic M23 firmy Lapp Kabel do zastosowań w robotyce
Światłowody
Przewody światłowodowe ciągle są jeszcze niszą w robotyce. Dla aplikacji wymagających przepływu ogromnych ilości danych światłowód może być alternatywą, chociaż przewody miedziane w większości wypadków oferują wystarczającą szybkość transmisji. Natomiast w przypadkach, kiedy równolegle z przewodami przesyłającymi dane prowadzone są przewody z silnymi prądami o charakterze impulsowym powodującymi silne interferencje i zakłócenia w elektrycznych transmisjach sygnałowych, światłowody są jedynym rozwiązaniem. Taka sytuacja występuje w przypadku robotów spawających, zasilanych bardzo dużymi prądami. Powszechne przekonanie, że światłowody nie nadają się do ruchomych aplikacji, nie jest słuszne. Zarówno te wykonane ze szkła, jak i plastiku mogą być użyte w takich zastosowaniach, przy zachowaniu odpowiedniego promienia zginania. W przypadku małych robotów szklany światłowód może nie spełnić oczekiwań w stosunku do promienia gięcia i lepiej sprawdzi się wersja plastikowa. Mimo że uzyskiwany w światłowodach plastikowych transfer na poziomie 100 Mbit/s nie jest wcale większy niż w przypadku przewodów miedzianych, to przewagą takiego połączenia jest odporność na zakłócenia w polu elektromagnetycznym.
Technika złączy
Oczekiwania producentów robotów w zakresie bardziej kompaktowych przewodów mają również przełożenie na wielkość złączy. Duże, konwencjonalne roboty są kontrolowane bezpośrednio za pomocą szafy sterowniczej podpiętej do ramienia robota poprzez klasyczne przemysłowe złącze prostokątne albo, w przypadku mniejszych robotów, okrągłe złącze M23. Jeżeli ramię robota jest wyposażone np. w kamerę do kontroli jakości, złącze powinno być w stanie dostosować się do wymogów transmisji danych. W takich przypadkach bardzo pomocne są złącza modułowe, jak np. rozszerzalny system złączy Epic MH produkcji Lapp Kabel. System tego rodzaju może być modułowo konfigurowany dla wielu typów przewodów oraz może akceptować wiele rodzajów złączy dla zasilania, rozmaitych sygnałów i transmisji danych. Jeżeli jakaś nowa funkcja zostaje dodana, wtedy odpowiedni moduł złącza zostaje dodany lub zastępuje inny moduł. Jest to szczególnie przydatne w gałęziach przemysłu, które obecnie podnoszą poziom automatyzacji, jak na przykład branża spożywcza.
Dla innowacyjnych producentów małych robotów Lapp Kabel zaprojektował specjalne typy złączy. Od złącza tego rodzaju wymaga się szybkiej instalacji i harmonijnego wkomponowania się w konstrukcję robota. Musi ono również zapewniać kompatybilność elektromagnetyczną EMC i być gotowe na transmisję typu Ethernet, jak również musi być wyposażone w takie funkcje obudowy, jak odciążenie przewodu oraz być przystępne cenowo.
Dla tego rodzaju wymagań Lapp Kabel opracował zmodyfikowane okrągłe złącza M23. Zasilanie i sygnały są dostarczane do ramienia robota poprzez przewody zakończone okrągłymi złączami M23. Dla robotów o mniejszych wymiarach zostały opracowane złącza o mniejszych gabarytach M17 oraz M12, i ten ostatni typ zyskuje coraz większą popularność. Jeżeli aplikacja wymaga zastosowania jeszcze mniejszych połączeń, jak na przykład w robotach o wewnętrznym okablowaniu, to takie złącza przestają być praktycznie przydatne i nie znajdują zastosowania. W takich sytuacjach przewody są częściowo łączone za pomocą niewielkich konektorów, znanych z zastosowań na płytkach drukowanych elektroniki.
Prezentacja kompaktowego robota Comau Racer na stoisku Lapp Gropp na targach w Hannowerze w 2016 roku
Produkty gotowe do montażu
Dla konstrukcji przewodów zasilających wychodzących z szafy sterującej trend jest jasno określony i zmierza w kierunku gotowych wiązek kablowych, oferowanych przez Lapp Kabel jako Ölflex Connect. Przewody do zamontowania na lub w robocie ciągle jeszcze są dostarczane klasycznie, czyli w metrach, ale zapotrzebowanie na gotowe wiązki jest w tym przypadku prawdopodobnie tylko kwestią czasu. Także przewody hybrydowe zaczynają odgrywać coraz większą rolę w okablowaniu maszyn. Zawierają one wszystkie niezbędne połączenia elektryczne, czasem także pneumatykę czy węże hydrauliczne – zamknięte w jednym płaszczu. Ta koncepcja nie znajduje jednak zastosowania w robotach kompaktowych z powodu niekiedy ciasno rozmieszczonych złączy dla serwomotorów, jak również czujników i innych sygnałów. W takim przypadku upakowywanie wszystkich przewodów w robocie w jednym płaszczu nie znajduje uzasadnienia.
Zbigniew Bańkowski
Autor jest pracownikiem
firmy Lapp Kabel