

Motoreduktory
Celem stosowania motoreduktorów jest redukcja obrotów maszyny napędowej i przeniesienie momentu. Są one urządzeniami bezobsługowymi przeznaczonymi do pracy ciągłej
Motoreduktory w przeciwieństwie do tradycyjnych rozproszonych układów napędowych charakteryzują się zwartą budową, niewielkimi rozmiarami i umieszczeniem prawie całego układu napędowego w jednej obudowie wraz z elektrycznym silnikiem napędowym prądu stałego lub przemiennego. Motoreduktory o budowie modułowej składają się z kilku modułów połączonych ze sobą mechanicznie.
W zależności od rodzaju przekładni zębatej wykorzystywanej na końcowym przełożeniu motoreduktory dzieli się na:
• walcowe,
• stożkowe,
• ślimakowe,
• płaskie,
• obiegowe.
Podstawową zaletą motoreduktorów są niewielkie wymiary i umieszczenie prawie całego układu napędowego w jednej wspólnej obudowie – w jednym miejscu. Projektant maszyn roboczych i innych urządzeń nie musi projektować układów napędowych i ich części składowych – dobiera jedynie gotowy motoreduktor z katalogów licznych producentów.
Podstawową wadą motoreduktorów jest osiąganie znacznych rozmiarów przy przenoszeniu dużych mocy przy jednoczesnym dużym przełożeniu. W takich przypadkach lepiej jest wykorzystać konwencjonalne rozproszone układy napędowe.
Do podstawowych parametrów motoreduktorów należą:
• współczynnik przeciążenia,
• moc,
• sprawność,
• moment wyjściowy,
• liczba obrotów wału wyjściowego,
• pozycja pracy.

Rys. 1. Schemat przekładni obiegowej
Rodzaje przekładni
Przekładnia walcowa
Przekładnia walcowa to przekładnia zębata o kołach walcowych i równoległych osiach leżących w tej samej płaszczyźnie. Przekładnie tego rodzaju są najczęściej używanymi przekładniami zębatymi. Zazwyczaj są wykonywane z zębami prostymi lub skośnymi, rzadziej z zębami daszkowymi lub łukowymi. Koła zębate mogą być zazębiane zewnętrznie lub wewnętrznie.

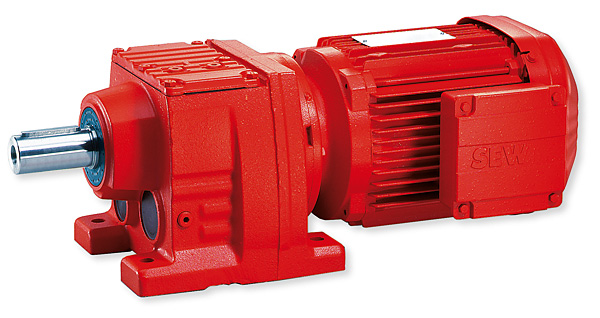
Rys. 2. Przekładnia zębata walcowa SEW-Eurodrive
Przekładnia stożkowa
Przekładnia stożkowa to przekładnia zębata, w której występują dwa koła zębate. Spotykanych jest wiele konstrukcji przekładni stożkowych, w których zęby mogą mieć zmienną wysokość, tzw. zęby zbieżne, lub stałą wysokość. W zależności od kształtu linii zęba wyróżnia się przekładnie stożkowe:
• proste,
• śrubowe,
• łukowe.
Przekładnie stożkowe stosuje się w motoreduktorach, w których potrzebne jest nierównoległe (najczęściej prostopadłe) przeniesienie mocy.

Rys. 3. Nowa seria motoreduktorów Lenze g500:
a – reduktor stożkowy z silnikiem Smart,
b – reduktor walcowy z silnikiem Smart,
c – reduktor walcowy płaski z silnikiem Smart
Przekładnia ślimakowa
Przekładnia ślimakowa – przekładnia zębata z osiami prostopadłymi leżącymi w dwóch różnych płaszczyznach. W tego rodzaju przekładniach współpracują ze sobą dwa elementy o różnych konstrukcjach:
• ślimak – wirnik śrubowy z gwintem trapezowym,
• ślimacznica (koło ślimakowe): z zębami śrubowymi, wklęsłe w przekroju wzdłużnym.
W przekładni ślimakowej przy przeniesieniu mocy występuje znaczne tarcie. Istotne znaczenie ma kierunek przepływu mocy. Gdy ślimak jest elementem napędzającym, sprawność przekładni h wyrażona jest zależnością:
η = tg γ / tg (γ + ζ)
gdzie:
γ – kąt wzniosu gwintu,
ζ – kąt tarcia, przy którym współczynnik tarcia η = tg ζ
Gdy elementem napędzającym jest ślimacznica, sprawność przekładni h wyrażona jest zależnością:
η = tg (γ + ζ) / tg γ
Gdy γ < ζ, sprawność przekładni ma wartość mniejszą od 0, co oznacza brak możliwości przeniesienia napędu, czyli samohamowność. Przekładnia ślimakowa w pewnych warunkach staje się mechanizmem samohamownym. Samohamowność może pojawić się przypadkowo, np. w razie wzrostu współczynnika tarcia ponad wartość dopuszczalną w wyniku niedostatecznego smarowania. Niekiedy cecha ta może być pożądana, wówczas przekładnia ślimakowa w jednym kierunku działa jako mechanizm napędowy, w przeciwnym zaś jako hamulec, np. w dźwignikach ślimakowych. Nie można jednak przekładni ślimakowej traktować jako hamulca, zwłaszcza w dźwignicach, wciągarkach i podobnych mechanizmach, w których decydujące są względy bezpieczeństwa. Gdy układ napędowy z zawieszonym obciążeniem jest rozpędzony i będzie wyłączony napęd, to w niesprzyjających okolicznościach ciężar się nie zatrzyma, lecz opadając będzie napędzać mechanizm i przyspieszać opadanie.

Rys. 4. Schemat przekładni różnicowej

Rys. 5. Napęd SEW-Eurodrive stosowany do przenośników kubełkowych. Urządzenie składa się z przekładni głównej, stożkowo-walcowej serii X z zabudowanym sprzęgłem jednokierunkowym oraz dodatkowym napędem rewizyjnym, zamontowanym na specjalnym adapterze
Przekładnia obiegowa
Przekładnia obiegowa – przekładnia zębata, w której jedno lub większa liczba kół nie ma ustalonej osi obrotu. Przekładnie obiegowe dzieli się na: przekładnie obiegowe planetarne o ruchliwości W = 1 i na przekładnie obiegowe różnicowe o ruchliwości W > 1. Typowa przekładnia obiegowa składa się z kół głównych nazywanych centralnymi lub słonecznymi oraz z kół obiegowych planetarnych umieszczonych na jarzmie. Kół obiegowych jest zwykle dwa lub więcej. W tego rodzaju przekładni są trzy możliwości przeniesienia mocy, tzn. trzy różne wartości przełożenia (rys. 1):
• jarzmo 4 jest unieruchomione – napęd jest przenoszony z koła 1 na koło 3 za pośrednictwem kół obiegowych 2 – w tym przypadku ze stałymi osiami

• koło 3 jest unieruchomione – napęd przenoszony jest z koła 1 na jarzmo 4 za pośrednictwem kół obiegowych 2

koło 1 jest unieruchomione – napęd jest przenoszony z koła 3 na jarzmo 4 za pośrednictwem kół obiegowych 2

W przekładni obiegowej można uzyskać znacznie większe przełożenia niż w zwykłej przekładni zębatej.
W przekładni obiegowej różnicowej (rys. 4) napęd z jarzma przenoszony jest za pośrednictwem kół obiegowych 2 i 2’ na dwa koła główne 1 i 3. W przekładni różnicowej żaden element nie jest unieruchomiony. Rozpływ mocy następuje do dwóch odbiorników, np. kół napędowych zainstalowanych na półosiach kół 1 i 3. Prędkości obrotowe tych kół dostosowują się do istniejącej sytuacji. Przekładnie różnicowe stosuje się w mechanizmach różnicowych pojazdów mechanicznych. Przełożenie przekładni różnicowej wynosi:

Zaletą przekładni obiegowych jest ich zwartość i wysokie przełożenia. Wadą zaś jest możliwość wystąpienia mocy krążącej. Moc krążąca to moc mechaniczna krążąca w układzie zamkniętym, np. w przekładni zębatej tracona w wyniku niedoskonałości przenoszenia mocy między zębami kół.
Do rozruchu silników napędowych motoreduktorów mogą być stosowane wszystkie znane sposoby i urządzenia rozruchowe silników elektrycznych – m.in. przełączniki z gwiazdy w trójkąt, softstarty i przekształtniki częstotliwości.
Opracowano na podstawie
materiałów firmowych
i stron www